
|
|
|
|
| VHF: Canal 77 |  |
 |
 |
 |
 |
|
|||||||
| Avisos | ||||
 |
|
|
Herramientas | Estilo |
|
#151
 18-11-2014, 12:41
18-11-2014, 12:41
|
||||
|
||||
|
Buenas,
No he participado en este foro antes, pero hace tiempo comencé un proyecto parecido no he avanzado mucho pero os dejo lo que tengo hecho por si os puede ayudar en algo, primero os indico los componentes que estoy usando: 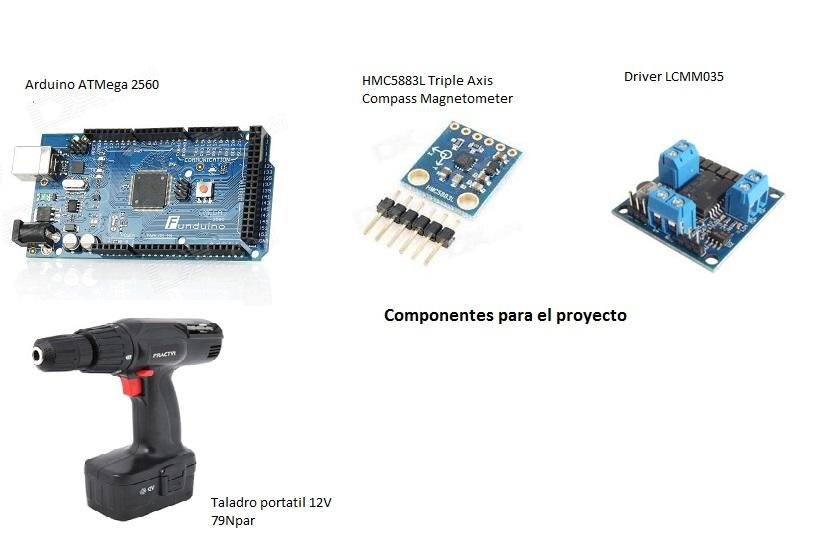 Y el código fuente para el Arduino, me falta el GUI para controlar el Arduino que empece en JAVA y lo tengo un poco parado no se como lo terminaré ni cuando, os dejo el código fuente para que funcione el Arduino, no hay nada probado es un simple juego... a partir de aquí las ideas que se aporten se agradecen: Código fuente del arduino: https://sourceforge.net/p/arduinopil...Automatico.ino Espero que os sirva de ayuda en algo, cualquier cosa intentaré aclararlo creo que estaba todo documentado sobre el códgio. Un saludo 
|
|
#152
18-11-2014, 12:53
|
||||
|
||||
 Cofrade danmar, gracias por compartirlo. No puedo visualizar las líneas largas del código, estan cortadas posiblemente por el tamaño de página. No creo que pueda llegar a entenderlo todo. Pero al menos me parece muy interesante. Intentaré comprenderlo. Lástima que lo dejaras. A ver si te animas otra vez. Cofrade danmar, gracias por compartirlo. No puedo visualizar las líneas largas del código, estan cortadas posiblemente por el tamaño de página. No creo que pueda llegar a entenderlo todo. Pero al menos me parece muy interesante. Intentaré comprenderlo. Lástima que lo dejaras. A ver si te animas otra vez. 
|
|
#153
18-11-2014, 13:00
|
||||
|
||||
|
Te adjunto el código en un ZIP con las dos librerías que necesita Arduino, en breve lo retomo y hasta donde probé funcionaba algo...
Espero que te sirva: ArduinoPilotoAutomatico.zip Un saludo
|
|
#154
18-11-2014, 22:53
|
||||
|
||||
Gracias. Me lo he leido por encima, y me gusta. Se ve muy elaborado. La libreria Timer no sé que controla. Pero no te esfuerzes en explicarmelo, gracias, pero me supera. Si para "reparar" dos ordenes he tardado tropecientas horas, para entender el tuyo....Bufff. Lo mío no es la programación. De momento me voy a dedicar a ver si puedo reparar un brazo de un viejo autohelm que tenia por casa. Y seguiré a la espera de acontecimientos.  A ver si Tamamoana me puede dar una ayuda para la búsqueda de las escobillas del motor (estan rotas). Son un tipo muy raro, hacen curva, tienen una forma como de interrogante. Lo pregunté en el representante de motores Maxon (se ve un motor muy bueno, creo que son Suizos) y me ofrecia comprar un motor nuevo. Pero vale un ojo de la cara. Por internet he visto recambios para Raymarine pero ya no montan los mismos (deberian durar demasiado  ) )Quisiera encontrar pues, escobillas, pero traducido me sale "brushless" y por brushles me salen precisamente motores sin escobillas. gracias
|
|
#155
18-11-2014, 23:45
|
||||
|
||||
|
Brushless es sin escobillas. Escobillas son Brushes.
Hazme una foto, dime medidas. Curvas no me suena haberlas visto, pero igual suena la flauta
__________________
La vida es aquello que te va sucediendo mientras tú te empeñas en hacer otros planes.
|
|
#156
19-11-2014, 10:18
|
||||
|
||||
|
Cita:
Entre las cosas que me encontré al comprar el velero, estaba un Autohelm 2000 de caña pero con el controlador aparte. Pusiera como pusiera el selector de rumbo, el motor solo giraba en un sentido. El brazo estaba a tope y no había manera de que retrocediera. El anterior propietario me dijo que no funcionaba. Y lo abrí para ver si veía algo roto. Fue cuando descubrí su sencillez una brújula (no era de aguja sino de disco) submergida en líquido, dentro de una cápsula, con unos contactos circulares en la base, y que al girar el selector de rumbo giraba la cápsula. Dos leds o luces y dos sensores fotoeléctricos. Ya puse un video del sitema en la entrada #60 de este hilo. Como no vi nada roto, desmonté el brazo y miré el motor. Llegaban 4 cables y pensé que se habría desoldado uno , levanté la tapita roja de la foto y todo parecía correcto. Pero al volver a montar, no me dí cuenta que debía separar las escobillas, luego me fijé qua hay dos agujeros para pasar algo como una aguja para cada escobilla. Para aguantarlas abiertas. Para que no toquen el eje hasta haber vuelto a poner la tapa. Luego se quitan las agujas y las escobillas vuelven a tocar el eje por acción de unos muellecitos. Pues eso, como no hice lo debido, las rompí al primer intento. Aquí la tapita desmontada las escobillas rotas. Le falta un trozo de sujeción a cada una.  En esta captura de la web del fabricante puedes ver un motor parecido con el mismo sistema de escobillas. La tapa, señalada en rojo se acaba de abrir y las escobillas estan cerradas. Yo intenté montarlo, sin abrirlas, y girando "suavemente" penses que se abririan solas, y fué que no...se rompieron.  Es una lástima porque el motor en cuestión es muy bueno. Encontré uno por ebay hace un año pero pedian 150. Encontré en otra web algunas características: DC voltage=12v VDC Shaft speed=9.200rpm Continous current=1.28amps Continous torque=0.1549 ln-lbs (0,1786kg-cm Out power=0,0147 También tengo la serie de numeros de referencia del Autohelm 1000 y del 2000, pero solo me sale una web de venta de motores con otros modelos. Pesa 175g sin la tapa. El diámetro del cuerpo (de acero) es de 32mm El grueso del cuerpo es de 2,25mm ¡No es una chapita!
|
|
#157
20-11-2014, 01:21
|
||||
|
||||
|
Leches geronimo, que escobillas más bonitas y raras
 Si a través de la marca no hay solución, solo se me ocurre hacerlas, pero esa forma es delicada. Lo de partir escobillas, es algo frecuente, no te tortures. Lamentablemente es como mucha veces se aprende.
__________________
La vida es aquello que te va sucediendo mientras tú te empeñas en hacer otros planes.
|
| Los siguientes cofrades agradecieron este mensaje a TAMAMOANA | ||
Geronimo (20-11-2014) | ||
|
#158
27-11-2014, 13:15
|
||||
|
||||
|
Buenas,
Como alguno de vosotros había mostrado interés sobre el proyecto, hoy he publicado la primera versión usable en modo demo a falta de fijar los parámetros de uso, la podéis revisar en la siguiente URL: https://sourceforge.net/p/arduinopil...versi%C3%B3n-/ La consola tiene la siguiente interface para funcionar: 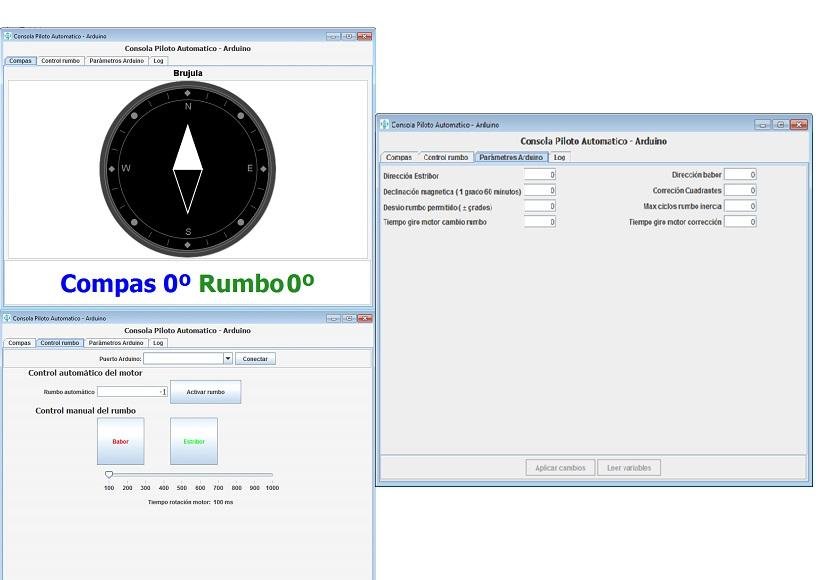 De momento para funcionar tiene que mantenerse conectado el arduino a el PC ya que cuando se cierra el puerto serie se reinicia el arduino por diseño del mismo. Un saludo
|
|
#159
20-12-2014, 00:00
|
||||
|
||||
|
Porfa, alguien con ganas y tiempo, que le eche un ojo a esto....
Necesito vacaciones en el Ripollés  http://forum.arduino.cc/index.php?topic=193866.0 
__________________
La vida es aquello que te va sucediendo mientras tú te empeñas en hacer otros planes.
|
| 2 Cofrades agradecieron a TAMAMOANA este mensaje: | ||
Geronimo (20-12-2014), sailoog.com (21-12-2014) | ||
|
#160
20-12-2014, 11:33
|
||||
|
||||
|
Cita:
Se usa el opencpn para mostrar los datos de navegación y en un rumbo determinado pulsas un botón conectado al arduino para que memorice el rumbo que quieres llevar. El ordenador manda periódicamente los datos del rumbo real al arduino que va moviendo el motor conectado a la caña para corregir dicho rumbo.
|
| 2 Cofrades agradecieron a druize este mensaje: | ||
sailoog.com (21-12-2014), TAMAMOANA (21-12-2014) | ||
|
#161
20-12-2014, 11:50
|
||||
|
||||
|
Gracias Druize, es que no tengo tiempo para dedicarle a este tema en este momento y necesitaba alguien experto que lo viera.
Gracias, puede ser lo que buscaba, encima más fácil e integrado en el open cpn.
__________________
La vida es aquello que te va sucediendo mientras tú te empeñas en hacer otros planes.
|
| Los siguientes cofrades agradecieron este mensaje a TAMAMOANA | ||
sailoog.com (21-12-2014) | ||
|
#162
21-12-2014, 11:43
|
||||
|
||||
|
sin tiempo para leerlo a fondo pero me parece que por lo comentarios al final se decidió a conectar el gps directamente al arduino no?
tambien me he dado cuenta que quizas este hilo se ha basado en el rumbo de aguja (magnetómetro) cuando quizas deberia hacerse teniendo en cuenta el rumbo verdadero (gps) no? si estoy fuera del rumbo fijado deseado segun el gps pues meto timon a bador o estribor hasta que coincidan. Se me está olvidando algo? quizas la velocidad de un gps no sea tan alta como la de un magnetometro, la mayoria funcionan a 9600baud que deberia ser suficiente no? o quizas la exactitud del gps no es suficiente? cuando tenga tiempo me leo tu enlace a fondo porque parece que tenia el asunto bastante avanzado edito: pues leyendo mas comentarios al articulo parece que la exactitud de las lecturas del rumbo de gps no son del todo exactas para este proposito... me voy corriendo, luego hablamos.... Editado por sailoog.com en 21-12-2014 a las 11:50.
|
|
#163
21-12-2014, 14:16
|
||||
|
||||
Acabo de probar con el móvil y el programa SailDroid. En plano parece que la brújula funciona bastante bién, (pero utiliza la brújula magnética del móvil) No he pensado en hacerle escorar . Los otros dos datos que ofrece en pantalla son la velocidad, (correcta) y la dirección de curso, para lo cual parece que va haciendo medias según la posición del gps, por lo tanto hay momentos en que la diferencia entre la brújula magnética del móvil y el "Course over Ground" es de 10 grados. Voy andando a 4Km/h. mientras la brújula presenta movimientos de 5º (según mis nervios ) la "brujula del gps" no cambia. Me he asegurado al repetir la prueba con el gps apagado y entonces solo veo los datos de la brújula magnética. . Los otros dos datos que ofrece en pantalla son la velocidad, (correcta) y la dirección de curso, para lo cual parece que va haciendo medias según la posición del gps, por lo tanto hay momentos en que la diferencia entre la brújula magnética del móvil y el "Course over Ground" es de 10 grados. Voy andando a 4Km/h. mientras la brújula presenta movimientos de 5º (según mis nervios ) la "brujula del gps" no cambia. Me he asegurado al repetir la prueba con el gps apagado y entonces solo veo los datos de la brújula magnética. Creo que con gps el timón realizaria un zigzagueo demasiado amplio. ____________________ Enviado desde mi Xiaomi 
|
|
#164
01-01-2015, 22:17
|
||||
|
||||
Año nuevo, sin novedad en el Arduino. Pero al menos, gracias al cofrade Jiauka he podido reparar el motor del brazo del piloto. Pongo fotos por si alguien algún dia alguien se encuentra con un problema similar, muy raro pero no imposible. La tapa de las escobillas del motor averiado que me envió Jiauka, resultó que también tenia algún pequeño defecto: una escobilla tenia un pequeño fragmento roto y suelto y muchas partículas posiblemente por andar rebotando por todas partes.(foto 1) Pero al menos la he podido aprovechar. Primero es necesario saber que abrir la tapa de escobillas es muy sencillo porque solo va sujeta con dos tornillitos pero para montarla es preciso usar algo para mantener abiertas las escobillas (foto 2) Pero al menos la he podido aprovechar. Primero es necesario saber que abrir la tapa de escobillas es muy sencillo porque solo va sujeta con dos tornillitos pero para montarla es preciso usar algo para mantener abiertas las escobillas (foto 2) y luego desoldar la tapa que queremos sustirtuir del circuito con las resistencias que lleva soldado a sus dos patillas. En este caso desoldo la A y soldo la B (foto 3) y luego desoldar la tapa que queremos sustirtuir del circuito con las resistencias que lleva soldado a sus dos patillas. En este caso desoldo la A y soldo la B (foto 3) . .Media hora de curro y listo, en el video se ve funcionando. Pero no me fiaría para hacer una travesia atlántica. El brazo lo regalo (por privado) gentileza de jiauka y mía, los portes no puedo que sigo en crisis. Editado por Geronimo en 01-01-2015 a las 22:20.
|
|
#165
02-01-2015, 21:30
|
||||
|
||||
|
Buenas tardes cofrades
Excelente trabajo el del autopilot Tengo una pregunta un poco basica para ese nivel: Yo quiero hacerme un compas de mamparo que tiene que ser digital para colocarlo en mi camarote, concretamente en sentido contrario al convencional. Por ello debe ser electronico. Habia pensado en una placa arduino, con un sensor hmc5883L y un display. Algo muy sencillo pero que me permita como patron levantando un poco la cabeza cuando estoy en la litera si hemos hecho un cambio de rumbo inesperado. De vuestras conversaciones interpreto que o coloco la placa del sensor hmc5883L sobre un cardan, o no me marcara nada. Es correcto? Cual podria usar? Solo quiero poder dormir con ese duermevela de patron un poco mas tranquilo. Muchas gracias
__________________
Santander la marinera, la que tiene azul el alma y al viento su corazon MMSI 205865910 CALL SIGN OR8659
|
|
#166
02-01-2015, 23:01
|
||||
|
||||
|
Yo creo que usaria la brújula del móvil. Pero por si te sirve para coger ideas, cuando intenté algo con el Arduino empecé por comprarme los elementos para hacerme una brujula digital según instrucciones de "BricoGeeK" (abajo pongo el enlace). Pero no lo llegué a montar. Y encima la libreria no me funcionaba para la otra prueba que puse en el post #148 y buscando por internet encontre una que si me funcionaba pare el HMC6352 , busca para el sensor que tu dices y añade "compas with arduino" en el Google y encontrarás muchos ejemplos. Este era el que decia: Tutorial Arduino: Brujula digital con HMC6352 (Muestra: 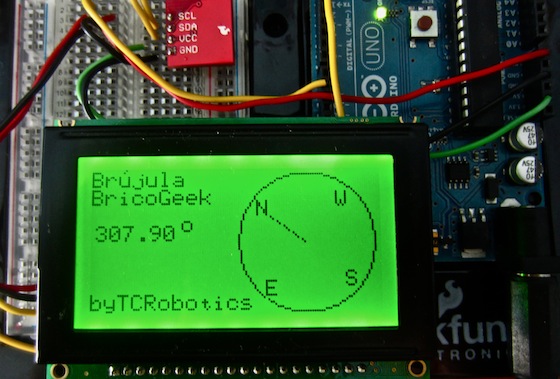 (Todas las ordenes para dibujar la circunferencia, la aguja y los textos en la pantallita, ya estan escritas) Editado por Geronimo en 02-01-2015 a las 23:04. Razón: enlace
|
|
#167
11-01-2015, 19:27
|
||||
|
||||
|
(Editado)
|
|
#168
11-01-2015, 19:29
|
||||
|
||||
|
Cita:
http://pikimorgan.blogspot.com.ar/20...duino.html?m=1
|
| Los siguientes cofrades agradecieron este mensaje a ontzimutil | ||
Loquillo (16-01-2015) | ||
|
#169
11-01-2015, 21:16
|
||||
|
||||
|
Jiauka es un crack, os lo digo yo que tengo pruebas
y del TAMA, poco más se puede decir que no se haya dicho por activa, pasiva y mediopensionista en este antro Una veradera enciclopedia, es lo que a lo largo de este hilo, habeis echo entre todos . Ya veis que entro tarde y remolon pues casi todo es chino para mi, pero siempre se saca alguna conclusion y se aprende un poco. para mi, pero siempre se saca alguna conclusion y se aprende un poco.Agradecido pues, MAESTROS !!!!!!!!!!!
__________________
AENAVE ,,,,, Y A SEGUIR NAVEGANDO !!!
|
|
#170
09-02-2015, 09:24
|
||||
|
||||
|
en este enlace está todo hecho ya, incluso precio de componentes y esquemas:
http://themarineinstallersrant.blogs...ack-built.html
|
|
#171
09-02-2015, 09:39
|
||||
|
||||
|
Cita:
Realmente el hilo podría zanjarse con ese proyecto pero no está al alcance de quemachismes como servidor. Por eso es el buscar algo más sencillo. http://foro.latabernadelpuerto.com/s...&postcount=113
__________________
La vida es aquello que te va sucediendo mientras tú te empeñas en hacer otros planes.
|
| Los siguientes cofrades agradecieron este mensaje a TAMAMOANA | ||
sailoog.com (09-02-2015) | ||
|
#172
12-09-2015, 19:16
|
||||
|
||||
|
El cofrade "eljuligallego" acaba de llegar y parece que da en el clavo. Ha abierto un hilo en "Comunidad"-"Charla General" titulado mi propio piloto automatico casero por menos de 100 http://foro.latabernadelpuerto.com/s...d.php?t=143376
|
|
#174
17-01-2016, 20:44
|
||||
|
||||
|
Hola, estaba buscando un puente en H MOS-FET o IGBT para el control de un motor DC y he visto este BTS7960B que soporta hasta 43 Amperios a 12 Voltios:
  Desde 9.5 euros se puede encontrar en ebay con envío incluido, permite el control directo del motor o por modulación de anchura de impulsos PWM, esta pensado para ser conectado directamente a una placa Arduino, pero por su conexionado de entradas, puede ser útil para controlar una bomba hidráulica potente desde un piloto de caña como un ST-1000 o un EV-100, es decir como etapa de potencia de estado sólido para pequeños pilotos sin tener que utilizar relés y con una circuitería mínima y compacta. El conexionado de entrada és este:  Y la regleta de 4 pines, salida motor + y -, entrada alimentación 12V + y -. Un saludo y una ronda para todos .  teteluis teteluis
|
| Los siguientes cofrades agradecieron este mensaje a teteluis | ||
boral (17-01-2016) | ||
|
#175
01-03-2016, 18:15
|
||||
|
||||
|
buenas tardes,
Una ronda de lo mejor que haya para todos que hoy estoy contento  Leí este hilo hace mucho tiempo y por aquel entonces pensé que esto no era para mi, pero la idea con el tiempo me fue calando hondo... mas aún después de ver los precios de los pilotos comerciales al querer hacerme con uno y encima ver que ninguno cumple con las condiciones especificas y excepcionales de mi barco. Básicamente lo que quería es lo que TAMAMOANA buscaba desde el principio; el tupaya. Y me puse a aprender sobre arduino desde 0. Por el momento he conseguido con un arduino uno y un magnetómetro hcm5883l que yendo a un rumbo dado y pulsar un botón establezca ese rumbo como referencia y que corrija a izquierda o derecha según convenga. Quiero pulirlo algo más en indicarle que si la desviación no es mayor de ciertos grados no haga nada y algún detalle mas antes de probarlo a bordo para que no estén los relés continuamente traqueteando. Además, quiero construir algo que mantenga el magnetómetro a nivel, igual que que se mantiene el compás ya que si no se vuelve un poco loco. Se que han comentado que esto también es posible vía software pero creo que al menos de momento eso se me complica demasiado, bastante lejos he llegado ya .Como actuador de timon tengo pensado usar: http://es.aliexpress.com/store/produ...4-7a804e1fc41d Para controlar el motor usaré: http://www.banggood.com/5V-4-Channel...e-p-87987.html Las librerías las he sacado de: https://learn.adafruit.com/adafruit-...iring-and-test Y la programación que llevo hasta ahora es esta: programacion arduino para autopiloto.txt Si alguien tiene alguna duda que pregunte sin contemplaciones que si se la respuesta se la daré y sino, que es lo mas probable ... pues mala suerteY si alguien tiene algo que añadir, mejorar, aclararme... mejor que mejor que esto me viene algo grande. Editado por el_pickti en 02-03-2016 a las 14:40.
|
| 2 Cofrades agradecieron a el_pickti este mensaje: | ||
boral (01-03-2016), catatonico (01-03-2016) | ||
|
Ver todos los foros en uno |
| Herramientas | |
| Estilo | |
|
|















 Modo lineal
Modo lineal

