
|
|
|
|
| VHF: Canal 77 |  |
 |
 |
 |
 |
|
|||||||
| Avisos | ||||
|
|
Herramientas | Estilo |
|
#23
 05-07-2022, 09:23
05-07-2022, 09:23
|
||||
|
||||
|
En física son muy normales las discusiones en las que las dos partes tienen razón..
Leyes del movimiento de Newton: -1.- Ley de la inercia. Todo cuerpo permanece en reposo o en movimiento uniforme en línea recta a menos que se aplique sobre él una fuerza o una serie de fuerzas cuya resultante no sea nula. 2.- Ley fundamental de la dinámica. El cambio de movimiento es directamente proporcional a la fuerza que se le imprime a un cuerpo y ocurre según la línea recta a lo largo de la cual esa fuerza actúa. Si la masa de un cuerpo es constante, la aceleración que sufre el cuerpo es directamente proporcional a la fuerza e inversamente proporcional a la masa. F=m*a 3.- Principio de acción y reacción. Con toda acción ocurre siempre una reacción igual y contraria: quiere decir que las acciones mutuas de dos cuerpos siempre son iguales y dirigidas en sentido opuesto. A las velocidades de que estamos hablando, estas tres leyes se cumplen siempre (perdón Gypsysyon). Son las leyes de la mecánica clásica. 1-Un barco permanece parado o en movimiento uniforme en línea recta mientras no haya fuerzas que actúen sobre él. La resistencia del agua es una fuerza, y un barco en movimiento se parará si no se le aplica una fuerza que iguale a esa resistencia. 2.- Si a un barco le aplicamos una fuerza, adquirirá una aceleración directamente proporcional a ella e inversamente proporcional a su masa. Aceleración significa aumento de velocidad; al aumentar la velocidad aumenta la resistencia al avance; el equilibrio se conseguirá cuando la fuerza propulsiva y la de resistencia se igualen y el barco navegará entonces a velocidad constante. Nos interesa esta posición de equilibrio, tal vez instantaneo, para analizar las fuerzas que actúan sobre el barco, cuya resultante total será cero. 3.- La fuerza de la gravedad actúa sobre el barco, su flotabilidad es la fuerza contraria que la anula. Son fuerzas contrarias de igual valor y sentidos opuestos. La flotabilidad busca anular el peso de barco, situándose bajo él, esta característica nos proporciona la estabilidad. Si remamos, o le damos al motor, también ejercemos una fuerza hacia atrás que nos devuelve un impulso hacia delante. Este principio tiene su lado curioso, si aspiramos agua con una potente bomba y la expulsamos hacia popa, aunque sea en el aire, nos vemos impulsados hacia delante. Al igual que un cohete, en el vacío, impulsa gases y es impulsado hacia delante. La mecánica clásica se estudia normalmente a través de la mecánica vectorial, que a su vez se divide en estática y dinámica. Su punto de partida, para analizar las fuerzas involucradas, consiste en aislar un cuerpo en equilibrio donde todas las fuerzas se anulan, en nuestro caso, un velero en movimiento. A la arquitectura naval también le interesa mucho esto para comprender y cuantificar en lo posible las diferentes fuerzas involucradas. Como navegantes creo que a todos nos interesa conocer como son las fuerzas que actúan sobre nuestro barco y como se relacionan entre sí, eso nos permite su optimización. 1- Si partimos del caso más simple, este sería un barco flotando sin viento y sin corriente. Dando por supuesto que el peso del barco es anulado por su flotabilidad, las fuerzas que actúan son cero y por lo tanto el barco permanece en reposo. 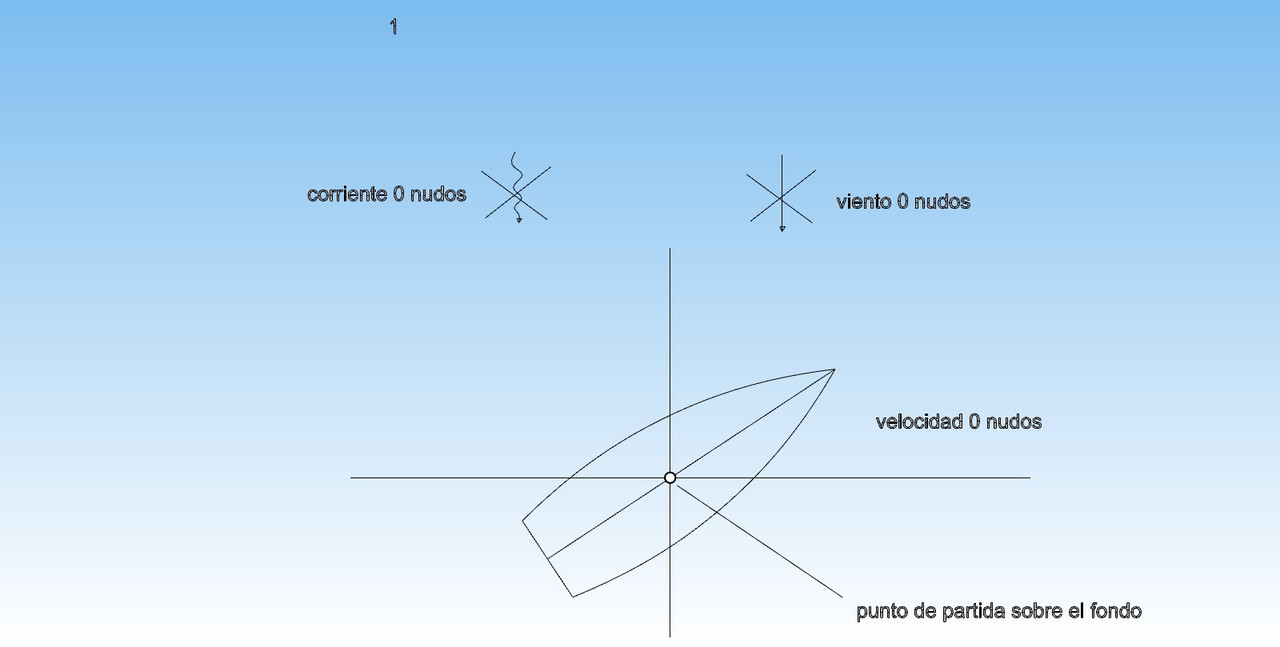 2- Si no hay corriente pero tenemos un viento de determinada dirección y velocidad, que podemos medir (parados) con nuestro equipo de viento, norte de 5 nudos, por ejemplo. Coincide con el viento que debe aparecer en una predicción meteo. Si no izamos velas, el barco continúa parado, o deriva ligeramente sobre el agua y sobre el fondo. 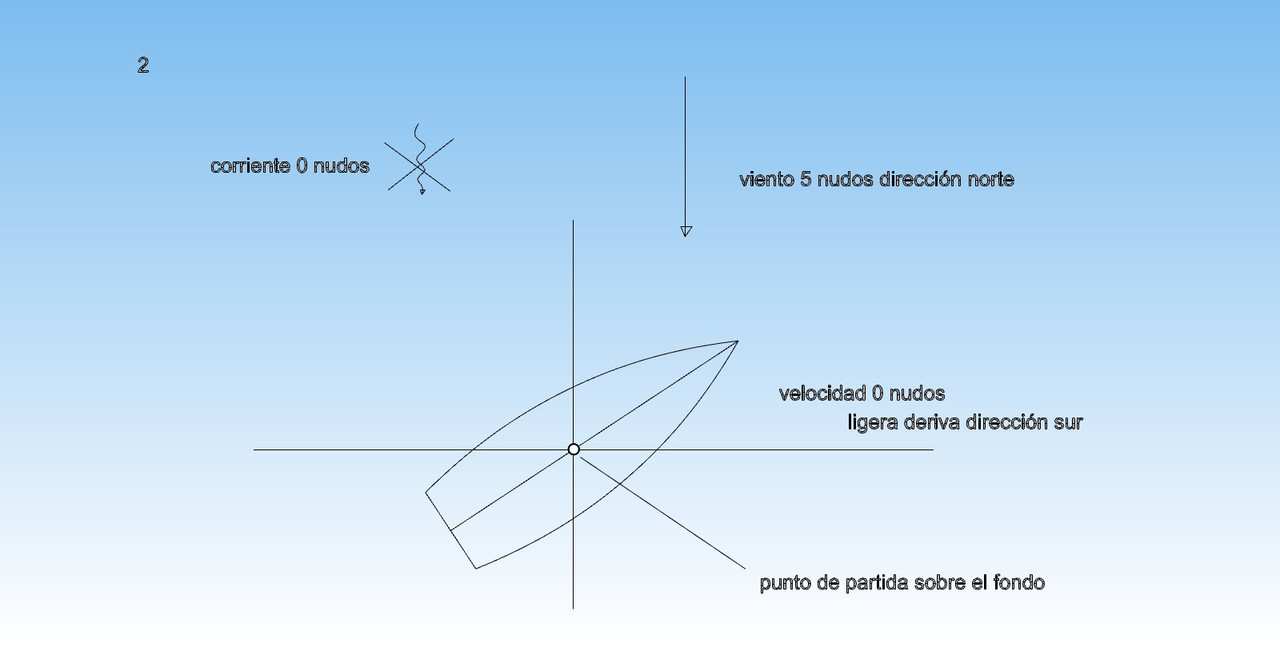 3- En esas condiciones izamos velas y ponemos el barco a ceñir. Obtenemos una velocidad de por ejemplo 3 nudos a 45º del viento real. El aparente pasa a ser 7,43 nudos y viene a 19º de nuestra proa (AWA). Del ángulo de viento aparente (AWA)(desde la proa) y su velocidad AWS), con la velocidad sobre el agua (STW) o sobre el fondo (SOG) y su dirección (compás magnético + abatimiento) o rumbo gps (COG), dándole un valor al abatimiento, podemos obtener el viento real (expresado normalmente con su ángulo con respecto a la proa TWA y TWS). No hay conflicto entre usar STW o SOG) 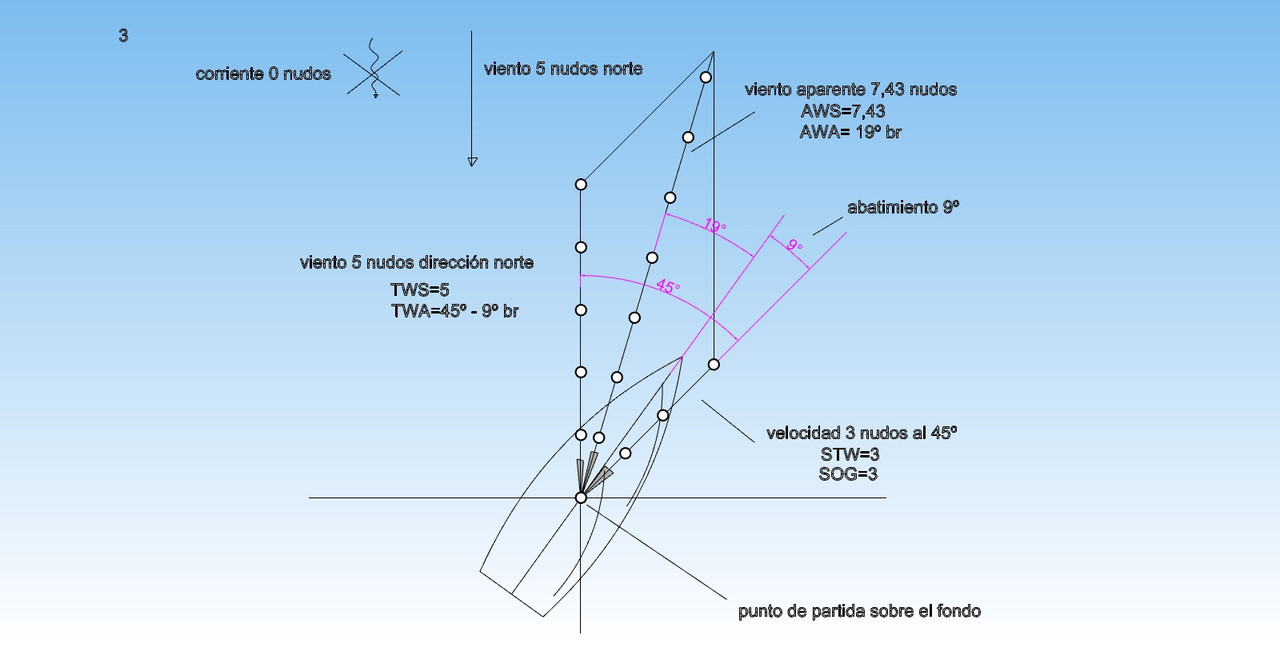 4- Vamos a ponernos en el caso de que hay corriente y no hay viento atmosférico, para que se vea claramente la diferencia. Corriente de 5 nudos del sur, nos lleva hacia el norte. A palo seco. La corriente nos desplaza a 5 nudos, el aire está quieto, notamos en el barco 5 nudos de viento y lo podemos medir con nuestro equipo de viento. AWS= 5 nudos. El AWA es la que sea, nos marcará el ángulo entre la proa y el norte. Podemos girar el barco con golpes de timón, el AWS será siempre 5 nudos. El rumbo sobre el fondo es norte, y la velocidad sobre el fondo será 5 nudos, la corredera del barco marcará cero. Al cabo de una hora estaremos a 5 millas al norte de la posición inicial. El equipo de viento marca el viento de corriente, o tide wind. 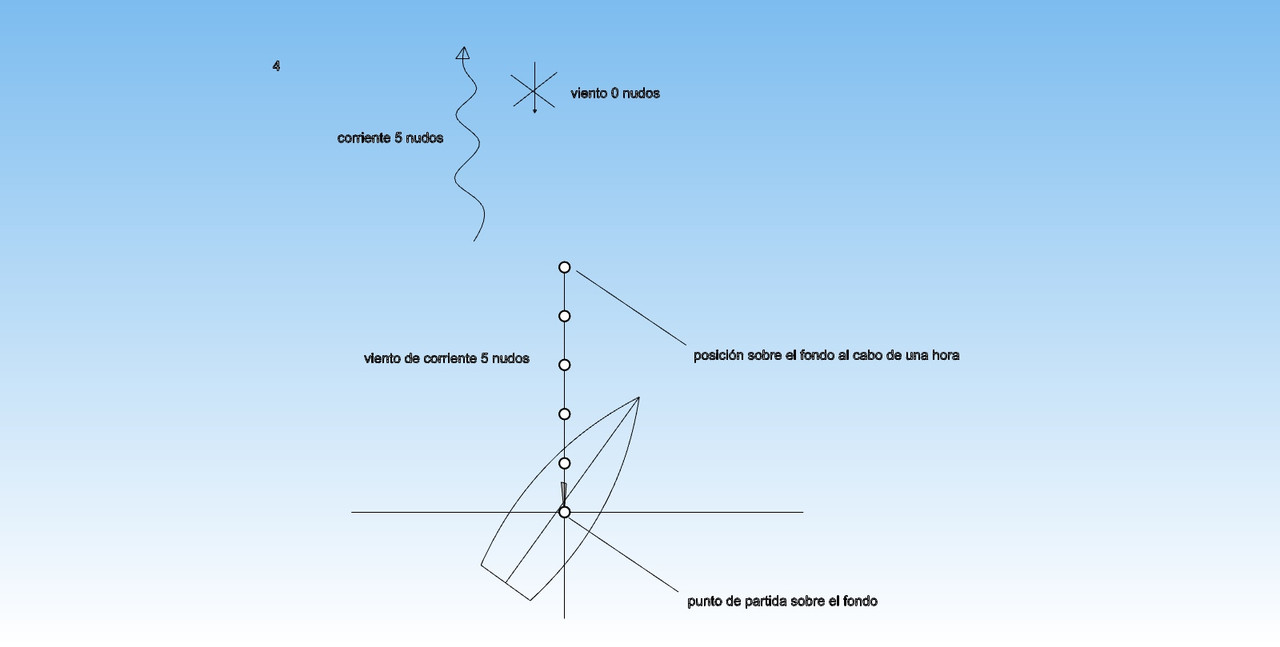 5- Izamos velas y ponemos rumbo de ceñida, el viento es de una dirección fija, norte y podemos utilizarnos para desplazarnos sobre el agua y alejarnos del punto de partida. Conseguimos navegar igual que antes. A 3 nudos y 45 grados del viento. El punto adonde llegaremos en una hora será la composición de esa velocidad sobre el agua y la de la corriente. En realidad nos desplazaremos sobre la línea del viento aparente, por un lado avanzamos sobre el agua y por otro nos desplaza la corriente. Vemos que STW y SOG son muy distintos. 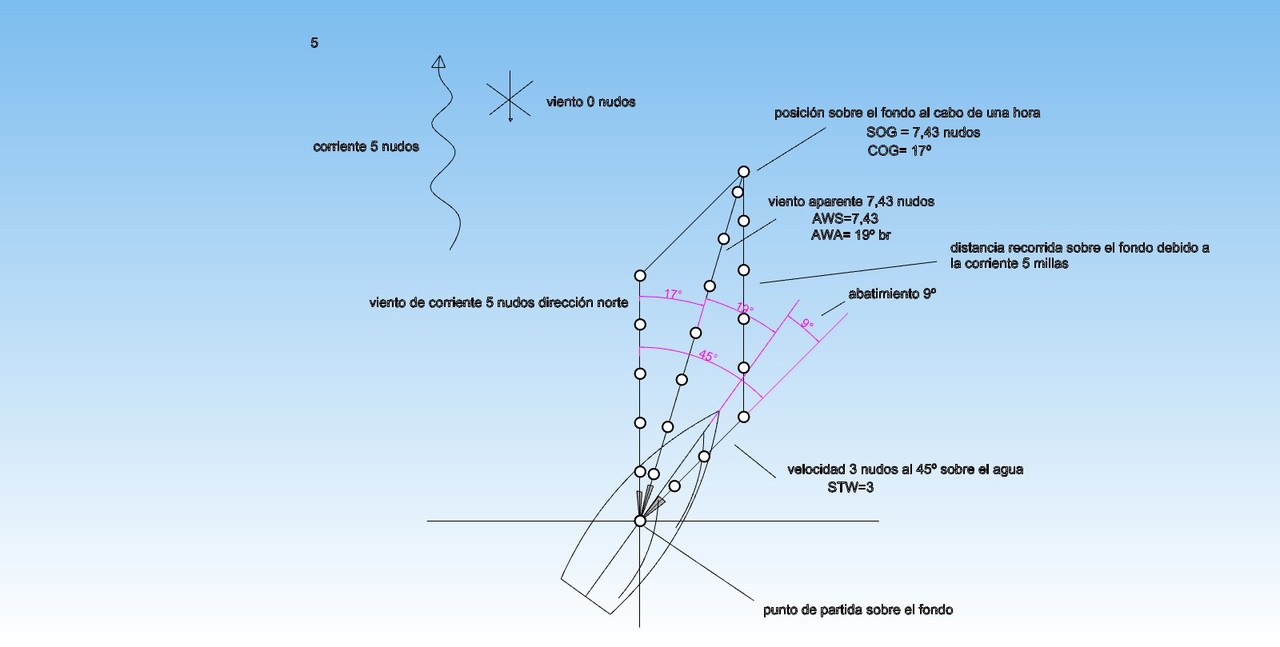 6- En el caso general, el viento real es una composición del viento geográfico y el viento de corriente. Pongo en este caso los valores necesarios para mantener un real de 5 nudos de norte. 1 nudo de corriente al 75º y 4,84 nudos de viento geográfico del 245º. Sin izar velas, el viento que sentimos y podemos medir es de norte de 5 nudos. Su AWA es variable con respecto a donde orientemos la proa y su AWS 5 nudos. El barco se mueve debido a la corriente y deriva ligeramente debido al viento. 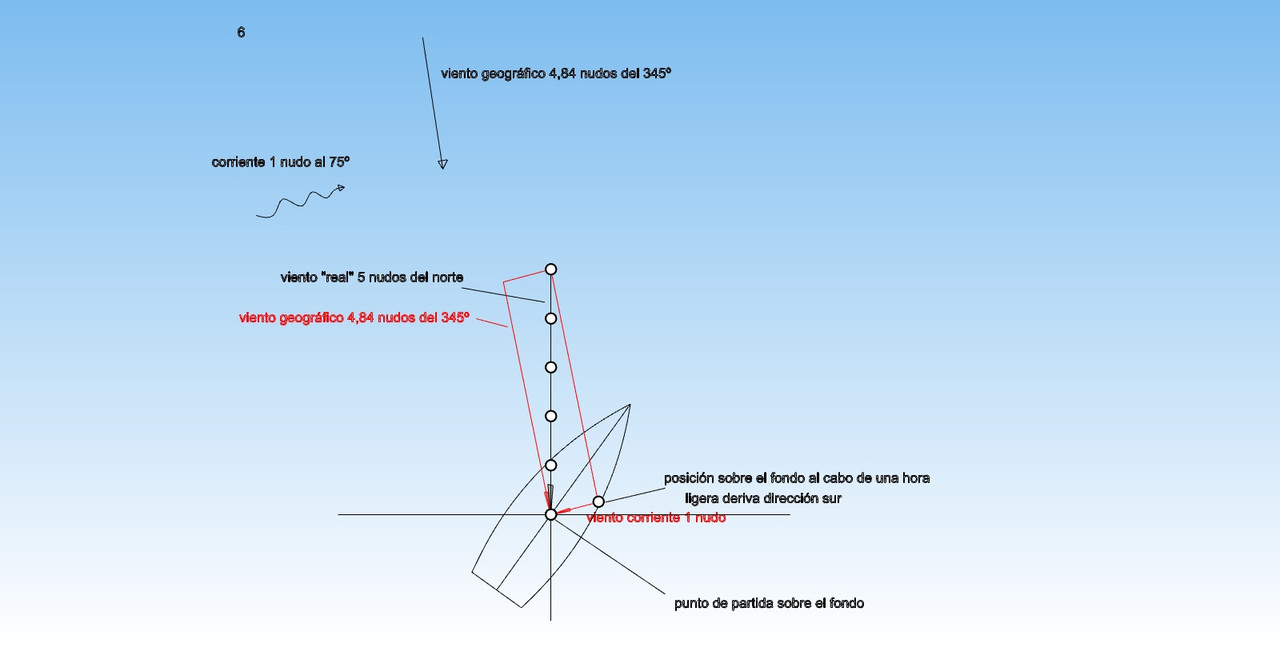 7- En el caso general, pero izando velas y poniendo el barco a ceñir, el barco empieza a moverse y aparece un aparente. La velocidad es de nuevo 3 nudos con respecto al agua. Con la velocidad sobre el agua (STW) y el aparente del equipo de viento podemos obtener el viento real (composición del viento geográfico y el de corriente. Si queremos obtener la corriente podemos restarle vectorialmente a la velocidad sobre el fondo (SOG) la velocidad del barco (STW) y la sabremos. Sabiendo la corriente podemos saber también el viento geográfico. 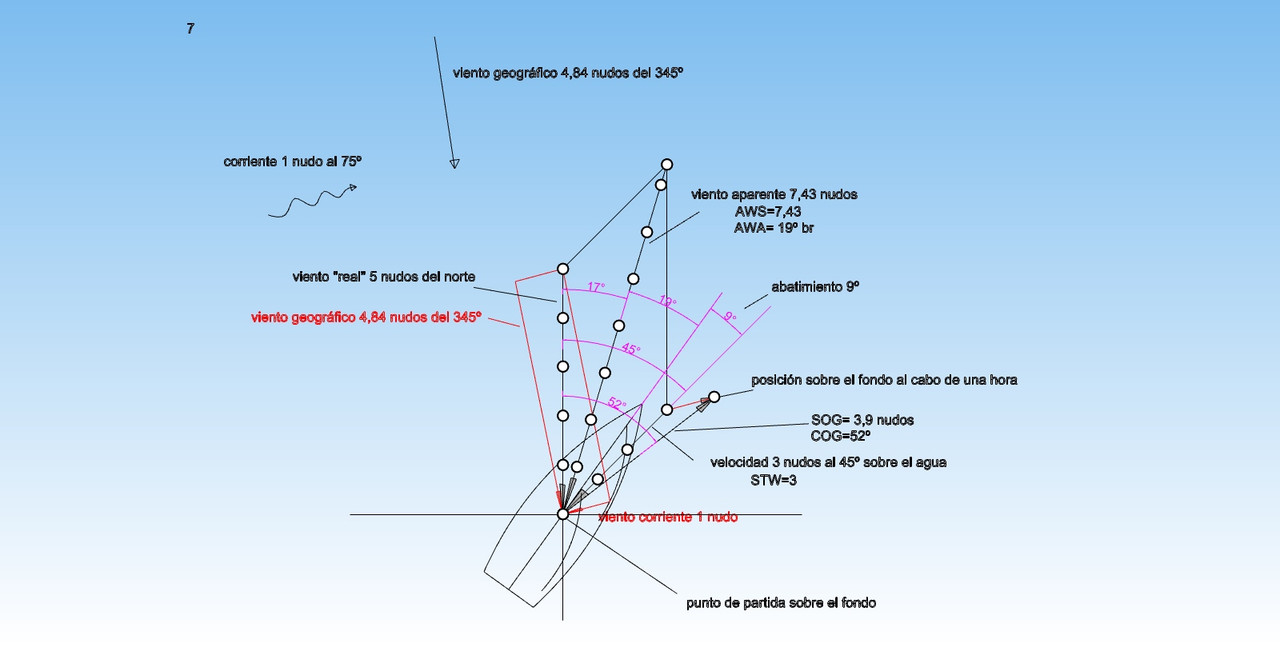 Me corregís si me he equivocado en algo. Y por supuesto habrá matices de si el viento cambia en altura, con la escora, si la corredera mide bien al no venir el flujo de proa, etc, etc.. Un saludo! 
__________________
"Se o remo rompe polo guión, paga patrón, se rompe pola pala, patrón paga" 
|
| 4 Cofrades agradecieron a caribdis este mensaje: | ||
|
|









 Modo de árbol
Modo de árbol