
|
|
|
|
| VHF: Canal 77 |  |
 |
 |
 |
 |
|
|||||||
| Avisos | ||||||
|
|
|
Herramientas | Estilo |
|
#12
 30-05-2023, 11:22
30-05-2023, 11:22
|
||||
|
||||
|
4. ¿Y el compás del piloto automático?
El compás de flujo magnético (fluxgate) del piloto también hay que calibrarlo. Lo que sigue es el procedimiento empleado en los equipos Raymarine ST4000; otras marcas y modelos pueden tener métodos diferentes. El proceso de calibración de los compases fluxgate es ligeramente diferente del que hemos seguido para calibrar el compás magnético, y también consta de dos fases. En la primera, en vez de obtener los valores de los desvíos para diversos rumbos, obtendremos un único valor promedio para todos ellos. Análogamente, en la segunda fase, no existirá una tabla de desvíos, sino un único valor que tendremos que minimizar. Además, existe una diferencia importante entre la calibración del compás magnético y la del piloto. Recordemos que para calibrar el compás tuvimos que configurar el plotter para que el GPS de referencia mostrara rumbos magnéticos. Pues bien, hay que tener en cuenta que, al igual que el plotter, el piloto automático se puede configurar para que muestre rumbos magnéticos o rumbos de caudrícula. Por tanto, es de la mayor importancia asegurarse de que los dos tienen la misma referencia para los rumbos, bien magnéticos o bien de cuadrícula. Esto lo haremos en los correspondientes menús de configuración de ambos equipos. La calibración del compás del piloto automático se lleva a cabo siguiendo un procedimiento guiado al que se entra seleccionando la opción "Swing Compass" del menú de configuración del piloto. Únicamente hay que seguir las instrucciones que aparecen en la pantalla de la unidad de control del piloto. El procedimiento consiste básicamente en dar al menos dos vueltas al horizonte a baja velocidad (menos de 2 nudos); si vamos demasiado rápido, el propio equipo nos lo advertirá. Si el procedimiento de autocalibración se completa satisfactoriamente, en la pantalla de la unidad de control aparecerá la indicación "DEVIATION", seguida de una cifra en grados. Esta cifra es el promedio de los máximos valores del desvío, extendido a todos los rumbos; si es inferior a 5°, lo daremos por bueno; si es superior, conviene repetir el proceso. A continuación de la autocalibración tendremos que llevar a cabo el proceso de alineamiento. Aunque las instrucciones de los manuales de Raymarine dejan bastante que desear en cuanto a claridad, sí indican lo siguiente (traducido del original en inglés): "Lo ideal sería comparar la lectura del rumbo con una serie de de rumbos conocidos, trazar una curva de desviación y determinar el valor que dará el menor error medio de alineación." Esto lo vamos a hacer de modo muy similar a como obtuvimos la tabla de desvíos para el compás magnético; para ello, daremos una vuelta al horizonte navegando a rumbos de la unidad de control del piloto automático 0°, 45°, 90°, 135°, 180° 225°, 270°, 315° y 360°. Anotamos el rumbo de la unidad de control y el rumbo del GPS de referencia, y las diferencias entre ambos. Calculamos el valor promedio de las diferencias, ponemos el barco a un rumbo cualquiera de la unidad de control del piloto automático, entramos en la opción "Align Hdg" del menú de configuración del piloto e introducimos el valor calculado. Ejemplo Obtenemos las lecturas siguientes de la unidad de control y del GPS de referencia:
¿Qué conseguimos con esto? Reducir el error promedio, lo que se ve fácilmente si representamos gráficamente las diferencias antes de efectuar el alineamiento (curva verde) y después (curva púrpura). En el primer caso se ve que hay más valores positivos que negativos (la media de todos los valores, que hemos calculado antes y que en la gráfica está marcada en línea fina de color verde, es 2), mientras que en el segundo hay aproximadamente los mismos valores positivos que negativos. La media, marcada en línea fina púrpura, se ha reducido a 0.  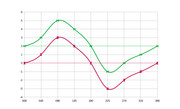 Finalmente, sólo queda reconfigurar las referencias de rumbos del plotter y del piloto a las que tuvieran (yo los tengo configurados para que ambos tengan como referencia el Norte de cuadrícula, más que nada porque es el plotter el que gobierna el piloto automático). Ah, y arriar las banderas OQ...  Y aquí queda terminado el proceso de calibración de los compases de a bordo. Gracias  a los cofrades que han tenido la paciencia de llegar hasta aquí. a los cofrades que han tenido la paciencia de llegar hasta aquí.Saludos y 
__________________
Navigare necesse est. Vivere non est necesse. (Pompeyo) Si damos bordos de menos de 180º, llegaremos a algún sitio... (anónimo) Editado por Apagapenol en 30-05-2023 a las 21:08. Razón: Añadir información 
|
|
|










 Modo de árbol
Modo de árbol