
|
|
|
|
| VHF: Canal 77 |  |
 |
 |
 |
 |
|
|||||||
| Avisos | ||||
 |
|
|
Herramientas | Estilo |
|
#1
 27-05-2023, 23:58
27-05-2023, 23:58
|
||||
|
||||
|
Buenas noches, cofrades:
Hace poco un cofrade pidió ayuda para encontrar a un compensador que le calibrara el compás, porque le exigían una tabla de desvíos para pasar la ITB. Como no quedaba claro que la tabla de desvíos tuviera que estar hecha por un compensador oficial, se me ha ocurrido redactar un tutorial para efectuar la calibración del compás y elaborar la tabla de desvíos nosotros mismos. El tutorial es una simplificación considerable de la publicación por excelencia para la calibración y compensación de compases, el "Handbook of Magnetic Compass Adjustment": https://msi.nga.mil/api/publications....pdf&type=view adaptada a los compases típicos de los barcos de recreo, que, al contrario de los compases de los buques, sólo tienen, en el mejor de los casos, dos tornillos de ajuste, N/S y E/W. En otros casos - por ejemplo, los compases Plastimo modernos - el elemento de ajuste se vende aparte, de modo que si no lo compramos, el compás no se podrá calibrar, y lo único que podremos hacer es obtener la tabla de desvíos. El proceso completo consta de tres fases: la comprobación inicial, la calibración propiamente dicha y la obtención de la tabla de desvíos. Sólo será necesario efectuar una calibración si los desvíos observados en la comprobación inicial son superiores a unos 5°; si no, pasaremos directamente a elaborar la tabla de desvíos. ¿Qué necesitamos para llevar a cabo la calibración del compás? Al igual que en cualquier otro proceso de calibración, necesitamos un patrón de referencia, que puede ser un objeto lejano de situación conocida, el azimut del sol en el momento de la calibración o bien otro instrumento con estado de calibración conocido. Los manuales de instrucciones de los compases - bastante escuetos, por cierto - suelen mencionar el uso de un compás de marcaciones como instrumento de referencia, pero nosotros vamos a utilizar el GPS de nuestro plotter, lo que nos va a permitir llevar a cabo la calibración sin excesivas complicaciones. Continuará... Saludos y 
__________________
Navigare necesse est. Vivere non est necesse. (Pompeyo) Si damos bordos de menos de 180º, llegaremos a algún sitio... (anónimo) Editado por Apagapenol en 01-06-2023 a las 19:13. Razón: Añadir información 
|
| 18 Cofrades agradecieron a Apagapenol este mensaje: | ||
Bernardo II (28-05-2023), genoves (30-05-2023), Jesús (28-05-2023), Juan Silver (28-05-2023), Juan St780 (30-05-2023), Kiro (28-05-2023), Leeway (28-05-2023), Ligera (28-05-2023), Lupas (28-05-2023), Manila1886 (28-05-2023), nico091 (28-05-2023), Parbat (28-05-2023), pupukeo (28-05-2023), Reivah (28-05-2023), ROyOR (02-06-2023), SoloHan (31-05-2023), Tabeirón Coruña (28-05-2023), tanisevo (29-05-2023) | ||
|
#2
28-05-2023, 08:07
|
||||
|
||||
|
Nos has dejado a medias con el calentón...

__________________
MMSI 224433790
|
|
#3
28-05-2023, 08:14
|
||||
|
||||
|
Como que a medias??? Es que ni ha empezado!!!!!
 Nuestro antiguo compás Plastimo si que lleva la pastilla de la que hablas para corregir
|
|
#4
28-05-2023, 10:02
|
||||
|
||||
|
Cita:
Cita:
Qué prisas... Saludos y
__________________
Navigare necesse est. Vivere non est necesse. (Pompeyo) Si damos bordos de menos de 180º, llegaremos a algún sitio... (anónimo)
|
| Los siguientes cofrades agradecieron este mensaje a Apagapenol | ||
Manila1886 (28-05-2023) | ||
|
#5
28-05-2023, 11:04
|
||||
|
||||
|
Me recuerdas mucho a una novia que tuve con 15 años, que mucha manita y mucho cine y luego na de na
 Cita:
__________________
MMSI 224433790
|
|
#6
28-05-2023, 12:08
|
||||
|
||||
|
Cita:
|
|
#7
28-05-2023, 16:01
|
||||
|
||||
|
Cita:
No te preocupes, que te vas a hartar... Saludos y
__________________
Navigare necesse est. Vivere non est necesse. (Pompeyo) Si damos bordos de menos de 180º, llegaremos a algún sitio... (anónimo)
|
|
#8
28-05-2023, 16:52
|
||||
|
||||
|
Bien, se acabaron las bromas, vamos allá...
Para llevar a cabo la calibración del compás es necesario que nuestro compás admita dicha calibración (¡menuda perogrullada! ); como he dicho más arriba, tenemos que asegurarnos de que nuestro compás está provisto de dos tornillos de ajuste, N/S y E/W. Si no es así, lo único que podremos hacer es obtener la tabla de desvíos (véanse unos posts más adelante).1. Comprobación inicial La comprobación inicial tiene por objeto verificar si el compás requiere ser calibrado; como ya he dicho, los compases normalmente no se calibran si sus desvíos son inferiores a 5°. Lo primero que tenemos que hacer es comprobar que el plotter está configurado para mostrar rumbos magnéticos. Si no lo estuviera, tendremos que escoger esta opción en el correspondiente menú de configuración. Aunque no es imprescindible, conviene también disponer de piloto automático, pero no vamos a utilizar el compás "fluxgate" del piloto; éste también tendremos que calibrarlo más adelante. Elegimos un día sin viento ni ola, en el que tengamos suficiente tiempo por delante, y salimos a motor con el barco adrizado a una zona suficientemente amplia, despejada y libre de corrientes, mareas y anomalías magnéticas (para esto último, consultar la carta); un antepuerto grande o una bahía protegida son ideales. Si queremos ser exquisitamente rigurosos y cumplidores, izaremos en la cruceta de babor las señales:   es decir, "Estoy calibrando el radiogoniómetro o el compás". Conviene registrar la latitud y longitud de la zona donde vamos a calibrar el compás y la declinación magnética del lugar, que la podemos obtener de la carta o de varias fuentes de internet, por ejemplo: https://www.ign.es/web/gmt-declinacion-magnetica https://www.ngdc.noaa.gov/geomag/cal.../magcalc.shtml Damos una vuelta al horizonte navegando a rumbos del compás 0°, 45°, 90°, 135°, 180°, 225°, 270°, 315° y 360°. En este punto conviene asegurarse de que el piloto automático mantiene los rumbos de modo estable. Anotamos el rumbo del compás y el rumbo del GPS de referencia, y las diferencias entre ambos. Si las diferencias son inferiores a unos 5°, pasaremos directamente a obtener la tabla de desvíos; en caso contrario, hay que calibrar el compás. Ejemplo Obtenemos los siguientes valores de rumbo de compás y rumbo de GPS de referencia:
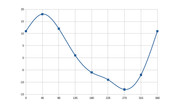 Evidentemente, este compás necesita una calibración. Continuará... Saludos y
__________________
Navigare necesse est. Vivere non est necesse. (Pompeyo) Si damos bordos de menos de 180º, llegaremos a algún sitio... (anónimo) Editado por Apagapenol en 13-06-2023 a las 07:31. Razón: Corregir erratas
|
| 10 Cofrades agradecieron a Apagapenol este mensaje: | ||
esscapar (28-05-2023), genoves (30-05-2023), Juan Silver (28-05-2023), Juan St780 (30-05-2023), Leeway (30-05-2023), Ligera (28-05-2023), Manila1886 (29-05-2023), Reivah (28-05-2023), ROyOR (02-06-2023), SoloHan (31-05-2023) | ||
|
#9
28-05-2023, 19:48
|
||||
|
||||
|
Seguimos...
Una vez que hemos comprobado que nuestro compás ha de ser calibrado, pasamos a la etapa de calibración propiamente dicha. La calibración comprende cuatro fases, en cada una de las cuales vamos a tratar de minimizar las diferencias de lectura entre el compás y el GPS de referencia para un rumbo en particular. Esto nos llevará a una disminución de las diferencias en todos los rumbos. 2. Calibración (1ª parte) Primero navegaremos a un rumbo de 90° del GPS de referencia. Actuamos sobre el tornillo de ajuste E/W del compás hasta que marque 90°; con esto anulamos el desvío en este rumbo. A continuación damos una vuelta al horizonte navegando a rumbos del compás 0°, 45°, 90°, 135°, 180°, 225°, 270°, 315° y 360°. Anotamos el rumbo del compás y el rumbo del GPS de referencia, y las diferencias entre ambos. Ejemplo (cont.) En esta fase obtenemos los siguientes valores de rumbo de compás y rumbo de GPS de referencia:
La representación gráfica de las diferencias, superpuesta con la del caso anterior, tiene este aspecto: 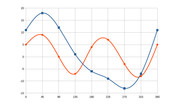 Ahora navegaremos a un rumbo de 0° del GPS de referencia. Actuamos sobre el tornillo de ajuste N/S del compás hasta que marque 0°; con esto anulamos el desvío en este rumbo. A continuación damos una vuelta al horizonte navegando a rumbos del compás 0°, 45°, 90°, 135°, 180°, 225°, 270°, 315° y 360°. Anotamos el rumbo del compás y el rumbo del GPS de referencia, y las diferencias entre ambos. Ejemplo (cont.) En esta fase obtenemos los siguientes valores de rumbo de compás y rumbo de GPS de referencia:
La representación gráfica de las diferencias, superpuesta con las de los dos casos anteriores, se muestra en la siguiente gráfica: 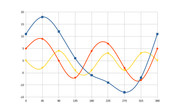 En la gráfica se aprecia muy bien que las diferencias totales van disminuyendo en cada fase, que es precisamente de lo que se trata al efectuar la calibración. Hasta aquí la primera parte de la calibración. Continuará... Saludos y
__________________
Navigare necesse est. Vivere non est necesse. (Pompeyo) Si damos bordos de menos de 180º, llegaremos a algún sitio... (anónimo) Editado por Apagapenol en 02-06-2023 a las 23:14. Razón: Corregir enlace
|
| 10 Cofrades agradecieron a Apagapenol este mensaje: | ||
esscapar (28-05-2023), genoves (30-05-2023), GUDARI (28-05-2023), Juan Silver (28-05-2023), kailu (28-05-2023), Leeway (30-05-2023), Manila1886 (29-05-2023), Pititis (28-05-2023), ROyOR (02-06-2023), SoloHan (31-05-2023) | ||
|
#10
29-05-2023, 06:16
|
||||
|
||||
|
Seguimos...
En la segunda parte de la calibración vamos a navegar a los rumbos opuesto a los de la primera, pero esta vez no anularemos las diferencias entre las lecturas del compás y las del GPS de referencia, sino que las reduciremos a la mitad. 2. Calibración (2ª parte) Primero navegaremos a un rumbo del GPS de referencia igual al promedio entre 270° y la lectura del GPS de referencia correspondiente a un rumbo de 270° del compás obtenida en el paso anterior. Actuamos sobre el tornillo de ajuste E/W del compás hasta que marque 270°, con lo que se habrá anulado la mitad del desvío en este rumbo. Luego damos una vuelta al horizonte navegando a rumbos del compás 0°, 45°, 90°, 135°, 180°, 225°, 270°, 315° y 360°. Anotamos el rumbo del compás y el rumbo del GPS de referencia, y las diferencias entre ambos. Ejemplo (cont.) En la fase anterior, para el rumbo de 270° del compás, el GPS de referencia indicaba 266°; de este modo el rumbo del GPS de referencia al que deberemos ir es (270 + 266) / 2 = 268°. En esta fase obtenemos los siguientes valores de rumbo de compás y rumbo de GPS de referencia:
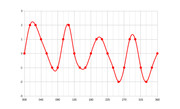
La representación gráfica de las diferencias, superpuesta con la de los casos anteriores, es como sigue: 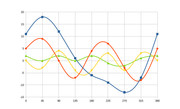 Ahora navegaremos a un rumbo del GPS de referencia igual al promedio entre 180° y la lectura del GPS de referencia correspondiente a un rumbo de 180° del compás obtenida en el paso anterior. Actuamos sobre el tornillo de ajuste N/S del compás hasta que marque 180°, con lo que se habrá anulado la mitad del desvío en este rumbo. A continuación damos una vuelta al horizonte navegando a rumbos del compás 0°, 45°, 90°, 135°, 180°, 225°, 270°, 315° y 360°. Anotamos el rumbo del compás y el rumbo del GPS de referencia, y las diferencias entre ambos. Ejemplo (cont.) En la fase anterior, para el rumbo de 180° del compás, el GPS de referencia indicaba 182°; de este modo el rumbo del GPS de referencia al que deberemos ir es (180 + 182) / 2 = 181°. En esta fase obtenemos los siguientes valores de rumbo de compás y rumbo de GPS de referencia:
La representación gráfica de las diferencias, superpuesta con las de todos los casos anteriores, es: 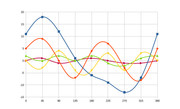 Se observa que en cada fase se han ido disminuyendo lo más posible las diferencias de lectura entre el compás y el GPS de referencia. Con esto ya tenemos el compás calibrado. La siguiente etapa es obtener la tabla de desvíos. Continuará... Saludos y
__________________
Navigare necesse est. Vivere non est necesse. (Pompeyo) Si damos bordos de menos de 180º, llegaremos a algún sitio... (anónimo)
|
| 9 Cofrades agradecieron a Apagapenol este mensaje: | ||
genoves (30-05-2023), Juan Silver (29-05-2023), Juan St780 (30-05-2023), Leeway (30-05-2023), Ligera (29-05-2023), Manila1886 (29-05-2023), Pititis (29-05-2023), ROyOR (02-06-2023), SoloHan (31-05-2023) | ||
|
#11
29-05-2023, 06:56
|
||||
|
||||
|
3. Obtención de la tabla de desvíos
Una vez que tenemos el compás calibrado, hay que obtener la tabla de desvíos; para ello, daremos una vuelta al horizonte navegando a rumbos del compás 0°, 15°, 30°, 45°, 60°, 75°, 90°, 105°, 120°, 135°, 150°, 165°, 180°, 195°, 210°, 225°, 240°, 255°, 270°, 285°, 300°, 315°, 330°, 345° y 360°. Anotamos el rumbo del compás y el rumbo del GPS de referencia, y las diferencias entre ambos. Ejemplo Obtenemos las lecturas siguientes del compás y del GPS de referencia:
 Saludos y
__________________
Navigare necesse est. Vivere non est necesse. (Pompeyo) Si damos bordos de menos de 180º, llegaremos a algún sitio... (anónimo)
|
| 13 Cofrades agradecieron a Apagapenol este mensaje: | ||
Costapinto (29-05-2023), genoves (30-05-2023), Icarus (30-05-2023), kailu (29-05-2023), Karl_Johan (29-05-2023), Leeway (30-05-2023), Manila1886 (29-05-2023), Oscar1966 (29-05-2023), Parbat (29-05-2023), Pititis (29-05-2023), Reivah (29-05-2023), ROyOR (02-06-2023), SoloHan (31-05-2023) | ||
|
#12
30-05-2023, 10:22
|
||||
|
||||
|
4. ¿Y el compás del piloto automático?
El compás de flujo magnético (fluxgate) del piloto también hay que calibrarlo. Lo que sigue es el procedimiento empleado en los equipos Raymarine ST4000; otras marcas y modelos pueden tener métodos diferentes. El proceso de calibración de los compases fluxgate es ligeramente diferente del que hemos seguido para calibrar el compás magnético, y también consta de dos fases. En la primera, en vez de obtener los valores de los desvíos para diversos rumbos, obtendremos un único valor promedio para todos ellos. Análogamente, en la segunda fase, no existirá una tabla de desvíos, sino un único valor que tendremos que minimizar. Además, existe una diferencia importante entre la calibración del compás magnético y la del piloto. Recordemos que para calibrar el compás tuvimos que configurar el plotter para que el GPS de referencia mostrara rumbos magnéticos. Pues bien, hay que tener en cuenta que, al igual que el plotter, el piloto automático se puede configurar para que muestre rumbos magnéticos o rumbos de caudrícula. Por tanto, es de la mayor importancia asegurarse de que los dos tienen la misma referencia para los rumbos, bien magnéticos o bien de cuadrícula. Esto lo haremos en los correspondientes menús de configuración de ambos equipos. La calibración del compás del piloto automático se lleva a cabo siguiendo un procedimiento guiado al que se entra seleccionando la opción "Swing Compass" del menú de configuración del piloto. Únicamente hay que seguir las instrucciones que aparecen en la pantalla de la unidad de control del piloto. El procedimiento consiste básicamente en dar al menos dos vueltas al horizonte a baja velocidad (menos de 2 nudos); si vamos demasiado rápido, el propio equipo nos lo advertirá. Si el procedimiento de autocalibración se completa satisfactoriamente, en la pantalla de la unidad de control aparecerá la indicación "DEVIATION", seguida de una cifra en grados. Esta cifra es el promedio de los máximos valores del desvío, extendido a todos los rumbos; si es inferior a 5°, lo daremos por bueno; si es superior, conviene repetir el proceso. A continuación de la autocalibración tendremos que llevar a cabo el proceso de alineamiento. Aunque las instrucciones de los manuales de Raymarine dejan bastante que desear en cuanto a claridad, sí indican lo siguiente (traducido del original en inglés): "Lo ideal sería comparar la lectura del rumbo con una serie de de rumbos conocidos, trazar una curva de desviación y determinar el valor que dará el menor error medio de alineación." Esto lo vamos a hacer de modo muy similar a como obtuvimos la tabla de desvíos para el compás magnético; para ello, daremos una vuelta al horizonte navegando a rumbos de la unidad de control del piloto automático 0°, 45°, 90°, 135°, 180° 225°, 270°, 315° y 360°. Anotamos el rumbo de la unidad de control y el rumbo del GPS de referencia, y las diferencias entre ambos. Calculamos el valor promedio de las diferencias, ponemos el barco a un rumbo cualquiera de la unidad de control del piloto automático, entramos en la opción "Align Hdg" del menú de configuración del piloto e introducimos el valor calculado. Ejemplo Obtenemos las lecturas siguientes de la unidad de control y del GPS de referencia:
¿Qué conseguimos con esto? Reducir el error promedio, lo que se ve fácilmente si representamos gráficamente las diferencias antes de efectuar el alineamiento (curva verde) y después (curva púrpura). En el primer caso se ve que hay más valores positivos que negativos (la media de todos los valores, que hemos calculado antes y que en la gráfica está marcada en línea fina de color verde, es 2), mientras que en el segundo hay aproximadamente los mismos valores positivos que negativos. La media, marcada en línea fina púrpura, se ha reducido a 0. 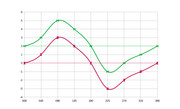 Finalmente, sólo queda reconfigurar las referencias de rumbos del plotter y del piloto a las que tuvieran (yo los tengo configurados para que ambos tengan como referencia el Norte de cuadrícula, más que nada porque es el plotter el que gobierna el piloto automático). Ah, y arriar las banderas OQ...  Y aquí queda terminado el proceso de calibración de los compases de a bordo. Gracias  a los cofrades que han tenido la paciencia de llegar hasta aquí. a los cofrades que han tenido la paciencia de llegar hasta aquí.Saludos y
__________________
Navigare necesse est. Vivere non est necesse. (Pompeyo) Si damos bordos de menos de 180º, llegaremos a algún sitio... (anónimo) Editado por Apagapenol en 30-05-2023 a las 20:08. Razón: Añadir información
|
|
#13
30-05-2023, 10:43
|
||||
|
||||
|
Muy elaborado, gracias por compartirlo
__________________
MMSI 224433790
|
| Los siguientes cofrades agradecieron este mensaje a Manila1886 | ||
Apagapenol (30-05-2023) | ||
|
#14
30-05-2023, 13:46
|
||||
|
||||
|
Muchas gracias.
Aprovecharé las vacaciones para esto. Enviado desde mi M2012K11AG mediante Tapatalk
|
| Los siguientes cofrades agradecieron este mensaje a Reivah | ||
Apagapenol (30-05-2023) | ||
|
#15
30-05-2023, 15:44
|
||||
|
||||
|
Cita:
|
| Los siguientes cofrades agradecieron este mensaje a Ligera | ||
Apagapenol (30-05-2023) | ||
|
#16
30-05-2023, 15:58
|
||||
|
||||
|
Fantástico artículo
 Digno del panel de hilos especiales.
__________________
'NAVEGAR NO ES UN LUJO, ES UN DERECHO'
|
| Los siguientes cofrades agradecieron este mensaje a genoves | ||
Apagapenol (30-05-2023) | ||
|
#17
30-05-2023, 16:54
|
||||
|
||||
|
Fantástico, Gracias por tu generosidad. :adoración::adoración:

|
| Los siguientes cofrades agradecieron este mensaje a Tofilin | ||
Apagapenol (30-05-2023) | ||
|
#18
30-05-2023, 22:46
|
||||
|
||||
|
Muy bien explicado. Gracias por compartirlo
|
| Los siguientes cofrades agradecieron este mensaje a Icarus | ||
Apagapenol (31-05-2023) | ||
|
#20
02-06-2023, 21:42
|
||||
|
||||
|
Muchas gracias Apagapenol, da gusto seguir aprendiendo en esta taberna.
Saludos Rafa
__________________
 RAFNI KAI www.RAFNI.es "Sean felices, porque la vida es urgente. La vida es una y ahora, así que hay que vivirla a tope y con intensidad"
|
| Los siguientes cofrades agradecieron este mensaje a ROyOR | ||
Apagapenol (02-06-2023) | ||
|
#21
02-06-2023, 22:02
|
||||
|
||||
|
Cita:
Para obtener la posición a partir de dichas señales se necesita un sistema de referencia, que es un modelo geodésico de la superficie terrestre; el más común, que es también el que emplean las cartas náuticas, es el WGS84 (World Geodetic System 1984 - Sistema Geodésico Mundial 1984). Para pasar los rumbos referidos al sistema geodésico WGS94 a rumbos magnéticos, existen modelos del campo magnético terrestre. El utilizado por la Oficina Hidrográfica Mundial es el WMM (World Magnetic Model - Modelo Magnético Mundial); la actualización más reciente del WMM es la de 2020. Pues bien, tanto el modelo geodésico como el magnético los tienes en tu plotter, y son más que suficientes para calibrar el compás de un barco de recreo, y por supuesto mucho más fiables que emplear el compás de marcaciones. Si estuvieras calibrando el compás tomando como referencia el rumbo magnético a un objeto conocido, estarías haciendo exactamente lo mismo: situarías el objeto en la carta (que es una representación en el plano del WGS84) y hallarías el rumbo magnético calculando la declinación magnética con la rosa náutica de la carta (que da los valores locales del WMM). Saludos y
__________________
Navigare necesse est. Vivere non est necesse. (Pompeyo) Si damos bordos de menos de 180º, llegaremos a algún sitio... (anónimo) Editado por Apagapenol en 03-06-2023 a las 07:36. Razón: Añadir información
|
|
Ver todos los foros en uno |
|
|












 Modo lineal
Modo lineal

